I am currently a Ph.D. student at KAIST, advised by Prof. Kyung-Soo Kim.
My research focuses on control and state estimation for legged robots, particularly on developing agile and dynamic motions for quadruped robots and humanoids. I’m also interested in reinforcement learning frameworks to enable robots to reason about their body dynamics and interactions with complex environments, ultimately achieving more adaptive and versatile behaviors.
If you have any questions or would like to discuss ideas, feel free to reach out via
email!
publications
*representative publications are highlighted in yellow.
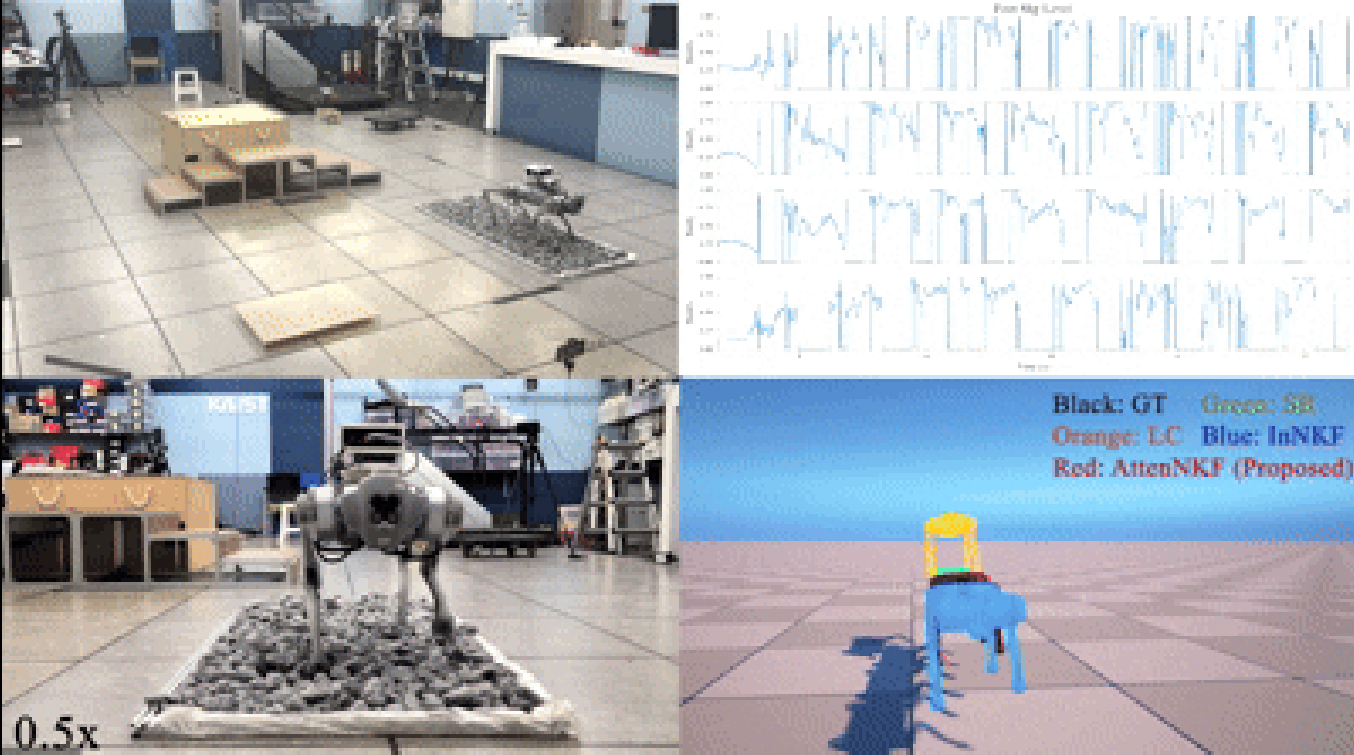
Attention-Based Neural-Augmented Kalman Filter for Legged Robot State Estimation
Seokju Lee, Kyung-Soo Kim
IEEE Robotics and Automation Letters (RA-L) (Under Review)
In this letter, we propose an Attention-Based Neural-Augmented Kalman Filter (AttenNKF) for state estimation
in legged robots. Foot slip is a major source of estimation error: when slip occurs, kinematic measurements
violate the no-slip assumption and inject bias during the update step. Our objective is to estimate this
slip-induced error and compensate for it. To this end, we augment an Invariant Extended Kalman Filter (InEKF)
with a neural compensator that uses an attention mechanism to infer error conditioned on foot-slip severity
and then applies this estimate as a post-update compensation to the InEKF state (i.e., after the filter
update). The compensator is trained in a latent space, which aims to reduce sensitivity to raw input scales
and encourages structured slip-conditioned compensations, while preserving the InEKF recursion. Experiments
demonstrate improved performance compared to existing legged-robot state estimators, particularly under
slip-prone conditions.
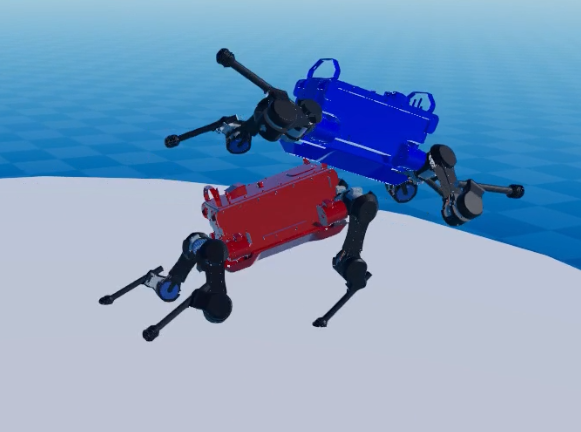
Legged Robot State Estimation Using Invariant Neural-Augmented Kalman Filter with a Neural
Compensator
Seokju Lee, Hyun-Bin Kim, Kyung-Soo Kim
The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems
(IROS)
This paper presents an algorithm to improve state estimation for legged robots. Among existing model-based
state estimation methods for legged robots, the contact-aided invariant extended Kalman filter defines the
state on a Lie group to preserve invariance, thereby significantly accelerating convergence. It achieves more
accurate state estimation by leveraging contact information as measurements for the update step. However, when
the model exhibits strong nonlinearity, the estimation accuracy decreases. Such nonlinearities can cause
initial errors to accumulate and lead to large drifts over time. To address this issue, we propose
compensating for errors by augmenting the Kalman filter with an artificial neural network serving as a
nonlinear function approximator. Furthermore, we design this neural network to respect the Lie group structure
to ensure invariance, resulting in our proposed Invariant Neural-Augmented Kalman Filter (InNKF). The proposed
algorithm offers improved state estimation performance by combining the strengths of model-based and
learning-based approaches.
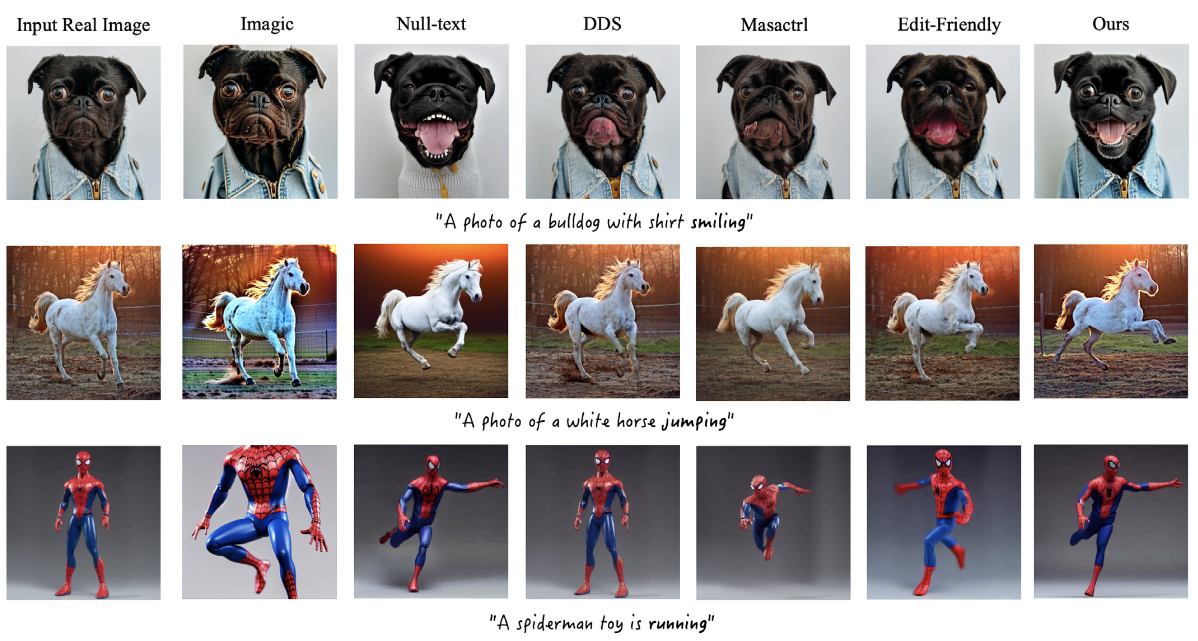
Text optimization with latent inversion for non-rigid image editing
Yunji Jung, Seokju Lee, Tair Djanibekov, Jong Chul Ye, Hyunjung Shim
Pattern Recognition Letters
Text-guided non-rigid image editing involves complex edits for input images, such as changing motion or
compositions of the object (e.g., making a horse jump or adding candles on a cake). Since it requires
manipulating the structure of the object, existing methods often compromise “image identity”– defined as the
overall object appearance and background details – particularly when combined with Stable Diffusion. In this
work, we propose a new approach for non-rigid image editing with Stable Diffusion, aimed at improving the
image identity preservation quality without compromising editability. Our approach comprises three stages:
text optimization, latent inversion, and timestep-aware text injection sampling. Inspired by the success of
Imagic, we employ their text optimization for smooth editing. Then, we introduce latent inversion to preserve
the input image’s identity without additional model fine-tuning. To fully utilize the input reconstruction
ability of latent inversion, we employ timestep-aware text injection sampling, strategically injecting the
source text prompt in early sampling steps and then transitioning to the target prompt in subsequent sampling
steps. This strategic approach seamlessly harmonizes with text optimization, facilitating complex non-rigid
edits to the input without losing the original identity. We demonstrate the effectiveness of our method in
terms of identity preservation, editability, and aesthetic quality through extensive experiments. Our code is
available at https://github.com/YunjiJung0105/TOLI-non-rigid-editing
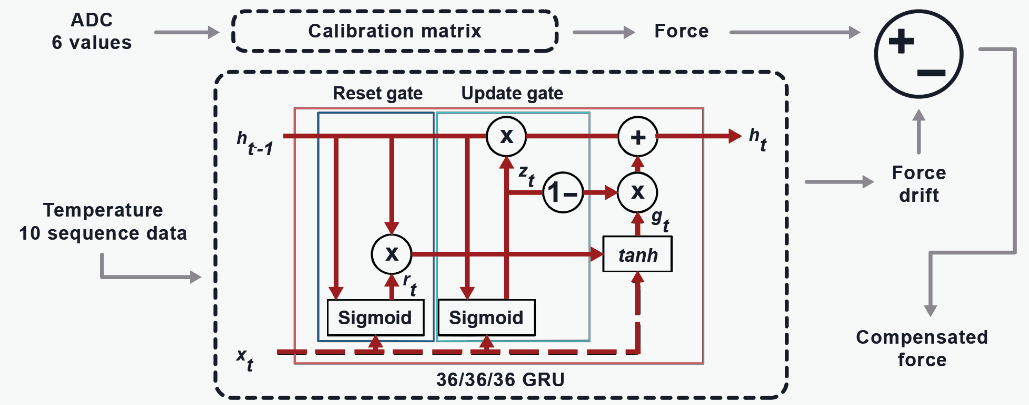
Temperature Compensation Method for a Six-Axis Force/Torque Sensor Using a Gated Recurrent Unit
Hyun-Bin Kim, Seokju Lee, Byeong-Il Ham, Keun-Ha Choi, Kyung-Soo Kim
IEEE Sensors Journal
This study aims to enhance the accuracy of a six-axis force/torque (F/T) sensor by improving upon existing
approaches that use a multilayer perceptron (MLP) and the least-squares method (LSM). While previous research
has used MLPs for thermal compensation, it has not effectively addressed temperature-induced drift. The sensor
used in this study operates based on infrared light and incorporates a photocoupler, which makes it highly
sensitive to dark current effects, resulting in significant drift under temperature variations. Moreover, its
compact and lightweight design (45 g) leads to low thermal capacity, making it susceptible to rapid
temperature fluctuations even with minimal heat input, which in turn affects real-time performance. To address
these challenges, this study proposes a gated recurrent unit (GRU)-based method and compares it with the
conventional MLP approach. Experimental results demonstrate that the GRU-based model significantly reduces
drift from 26 to 2.7 N, and the root mean square error (RMSE) from 500 to 3—representing a 100fold
improvement. These findings suggest that GRU-based modeling substantially improves real-time F/T measurements
in temperature-sensitive environments, benefiting applications in robotics and precision instrumentation.
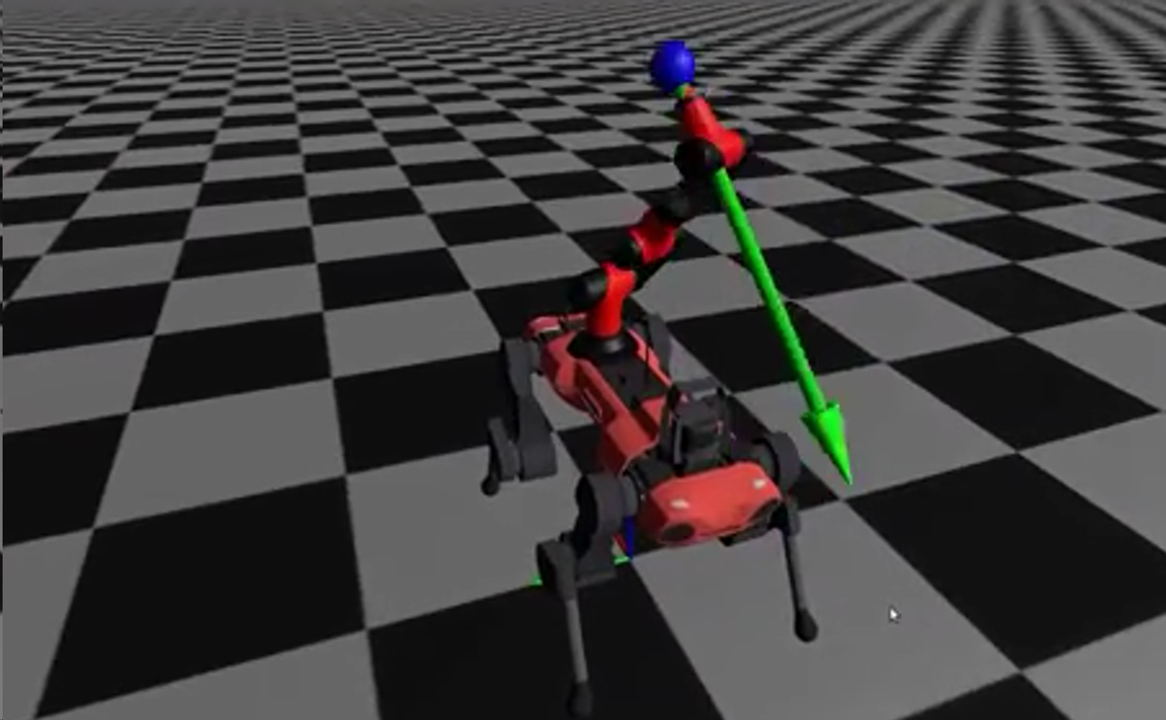
Learning legged mobile manipulation using reinforcement learning
Seokju Lee, Seunghun Jeon, Jemin Hwangbo
The 2022 International Conference on Robot Intelligence Technology and Applications
(RiTA)
Many studies on quadrupedal manipulators have been conducted for extending the workspace of the end-effector.
Many of these studies, especially the recent ones, use model-based control for the arm and learning-based
control for the leg. Some studies solely focused on model-based control for controlling both the base and arm.
However, model-based controllers such as MPC can be computationally inefficient when there are many contacts
between the end-effector and the object. The dynamics of the interactions between a quadrupedal manipulator
and the object in contact are complex and often unpredictable without high-resolution contact sensors on the
end-effector. In this study, we investigate the possibility of using a reinforcement learning strategy to
control an end-effector of a legged mobile manipulator. The proposed framework is verified for a walking and
tracking task of the end-effector in a simulation environment.
projects