Control 6-dof Robot Manipulator
Modeling and Kinematic Control of a 6-DOF Robot Manipulator
Duration: 2021.09 - 2021.12
Project Overview
This project focuses on the kinematic modeling and control of a custom 6-DOF robot manipulator. The primary goal was to derive the kinematic equations, implement them in code, and verify the robot’s motion capabilities in a simulation environment.
1. Robot Modeling
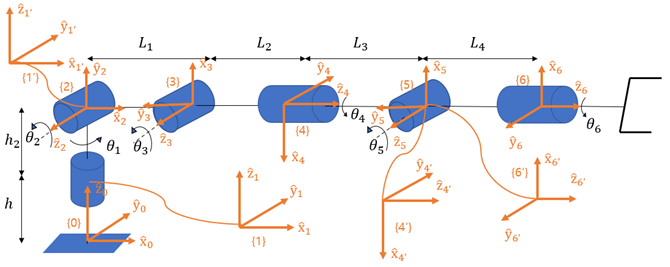 Fig 1. Denavit-Hartenberg Parameters
Fig 1. Denavit-Hartenberg Parameters
- D-H Parameters: Defined the robot’s geometry using Denavit-Hartenberg (D-H) parameters. Coordinate frames were assigned to each link to establish the transformation matrices.
- URDF: Created a Universal Robot Description Format (URDF) file to represent the robot’s physical structure for the PyBullet simulation.
2. Kinematics
- Forward Kinematics (FK): Derived the homogeneous transformation matrices to calculate the position and orientation of the end-effector relative to the base frame given the joint angles.
- Inverse Kinematics (IK): Implemented an analytical solution to compute the required joint angles to reach a desired end-effector position and orientation. This involved solving geometric equations to map the task space coordinates back to the joint space.
3. Motion Planning & Simulation
- Trajectory Generation: Designed algorithms to generate smooth paths for the end-effector to follow specific geometric shapes.
- Verification: Validated the kinematic model by making the robot draw shapes such as a square and a circle in the simulation. The simulation confirmed that the IK solver correctly computed the joint configurations for the defined trajectories.
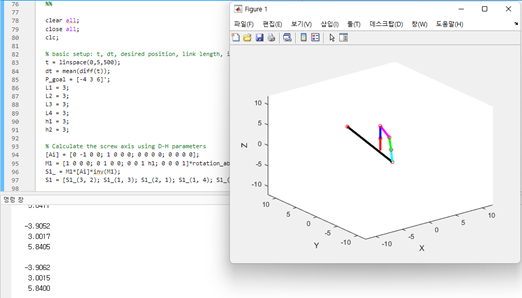 Fig 2. Simulation of the 6-DOF manipulator following a trajectory
Fig 2. Simulation of the 6-DOF manipulator following a trajectory
Acknowledgement
This research was conducted in the MEN461 Introduction to Robotics course at UNIST.